课程网站 在头条 AML 实习的时候就觉得这个 AI system 方向非常有趣,但是苦于实验室不是搞这一套的,自己拖延症也非常严重,所以一直在入门的边缘徘徊。但是在今天——研一秋学期考试周的前一周,我决定开始学习 AI system 方向最著名的必学课程,Tianqi Chen 在 UW 开设的 CSE599W。 这个课程其实资料并不是很完善,只有 github 上面的几个 repo 和课程网站上面的 slide,缺乏讲课的视频资源。而且在开始学习之前就听说很多地方 slide 写的非常简陋,只能通过 tvm 和 tinyflow 代码慢慢学习。我在学习之前也找了一些 blog 资源,开个坑,希望可以努力坚持下来! 本人的作业也开源到 github 上面了,希望大家多多指导。
Chenfan Blog——CSE 599W: Systems for ML
不过上面这两个参考资料,第一个有点过于简略,第二个虽然写的很好但是已经五个月没有更新了...可能是坑了,所以后面的内容还是要靠自己慢慢研究了... 第三篇是蓝色大大的 TVM 入门文章,写的非常赞,可以清晰的理解 TVM 存在的意义与解决的问题。
Lecture 1-2
介绍了一波深度学习的基本概念,常见的各种 CNN、RNN、激活函数、BatchNormal、梯度消失与梯度爆炸都用一节课介绍了一通。因为我之前学过 Ng 在 coursera 上面的 Deep learing 专项,所以对这些都很了解了,而且这些内容的资源满大街都是,就不在这里继续介绍了。 第二讲是一个实验课,用 mxnet 搭建一个基础的网络,虽然我之前系统看过沐神的《动手深度学习》,但是我看的是 github 上面的 pytorch 魔改版,mxnet 只在上半年的华为软挑的时候用过一下,不是特别了解。但是这个 gluon api 似乎跟 pytorch 大同小异,这里也不多废话了,有兴趣自己看看原版《动手深度学习》就好了。
Lecture 3: Overview of Deep Learning System
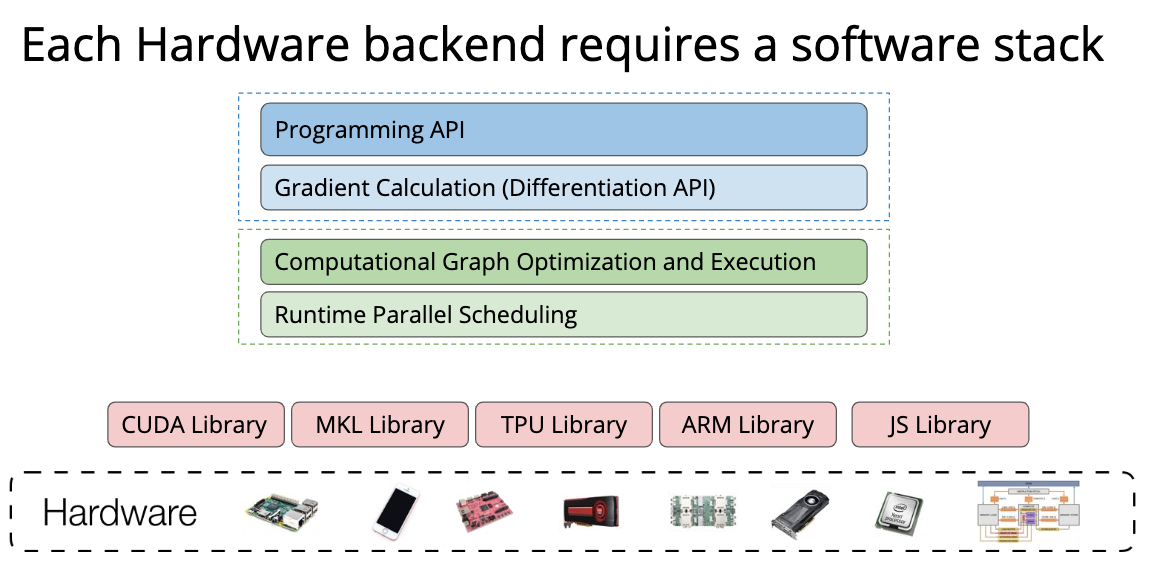
学习过什么是 Deep Learning 了,那么啥是 Deep Learning System 呢? 在我的理解其实就是从调包到真正计算出结果的全过程,就是 Deep Learning System,也就是通常所说的算法的真正落地。 在这个课程中,Deep Learning System 从高层到底层分成了三个部分:
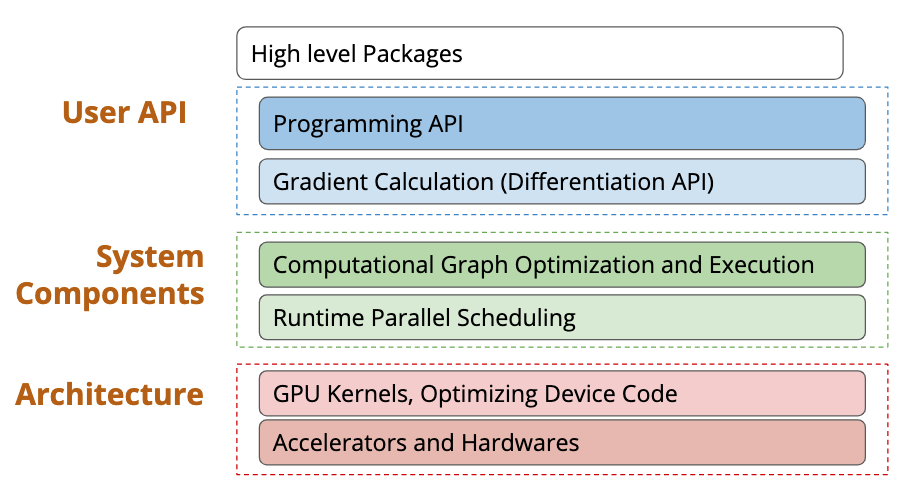
第一部分就是调包的封装 API,第二部分表示调完包后对调包代码的优化与 Scheduling,第三部分就是最下面的一些高效的 GPU kernel 实现、不同硬件后端的部署等等。 那么一个 Deep Learning 框架在 API 层需要包括什么内容呢?为什么大家要用框架而不是自己从头写呢? 下面这个图就回答了这个问题,现在的模型越来越大,实现起来需要注意的内容也就越来越多,如果每步都由我们自己来进行链式求导算梯度的话,可能就没有这么多转行深度学习的大哥了(
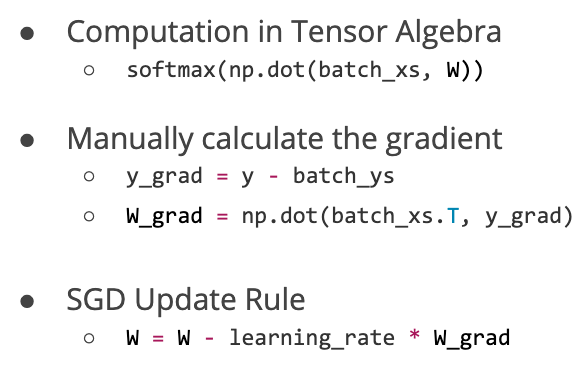
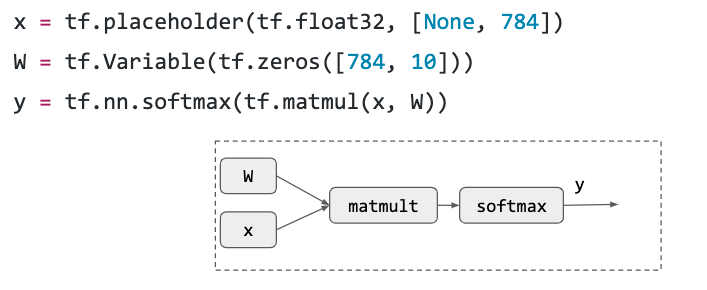
计算图是一个 Deep Learning 框架的基本概念,节点表示运算操作,边表示数据依赖,这里展示了一个最简单的 Logistic Regression 计算图实例: 首先是计算 loss 之前的前向传播,其实就是一个最简单的矩阵乘法加一个 softmax:
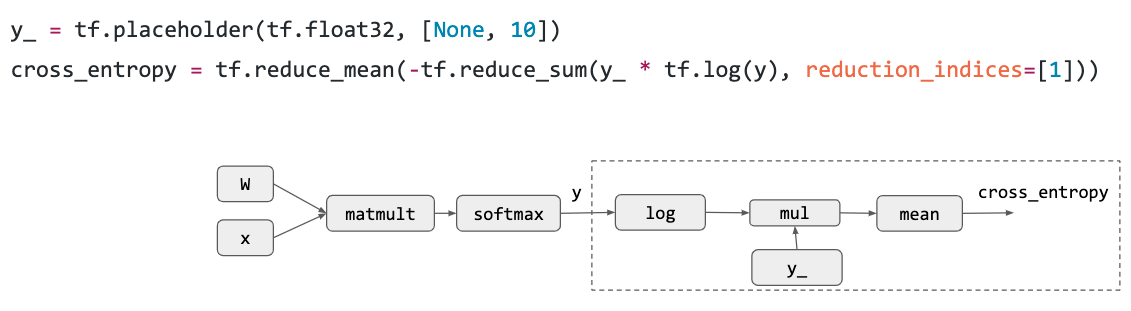
然后是将 softmax 输出的东西搞一个交叉熵作为 loss,相当于最大化 liklihood:
然后是自动微分:
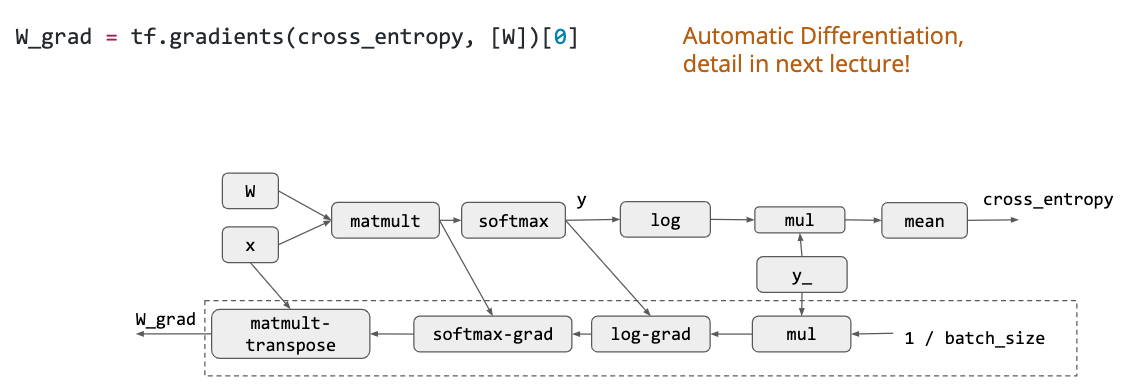
最后通过 SGD 来更新梯度:
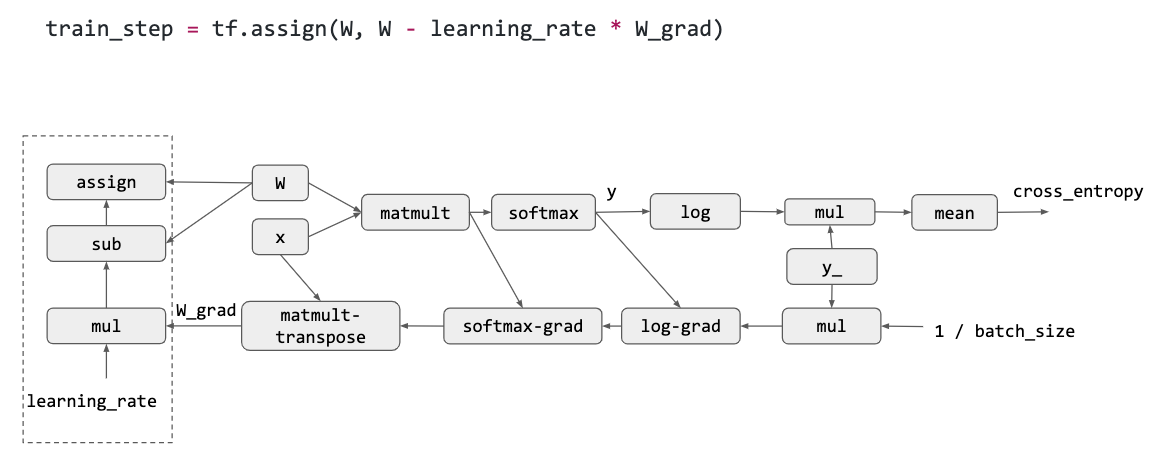
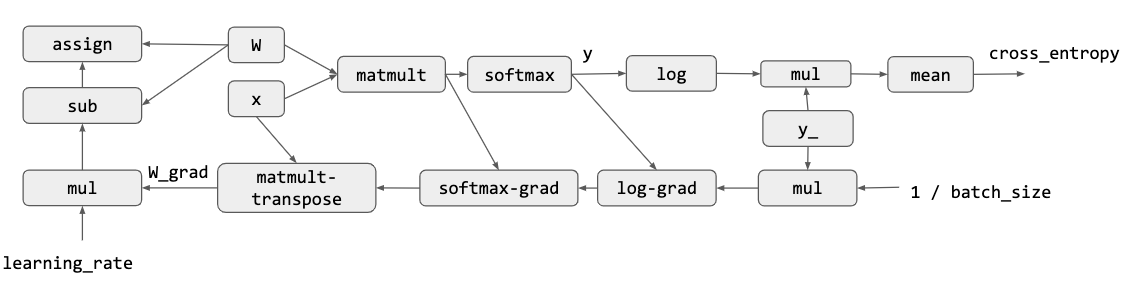
结合上面的所有步骤,我们就得到了一个计算图:
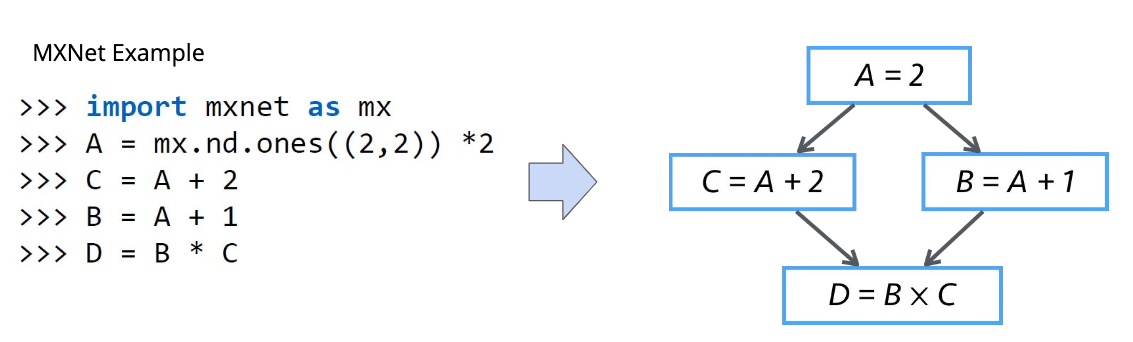
最上层的 API 做了最简单的介绍,下面就是中间的 System 部分,讲的是对计算图的优化和对计算的调度。 计算优化最简单的一种就是 memory 优化,比如增加 cache 利用率之类的。因为我们的代码通常跑在多个线程甚至多个计算设备上面,所以并行调度也是非常重要的。最简单的一种并行调度如下图,这是一个 mxnet 代码,因为计算 C 和计算 B 是完全独立的,所以这两个部分可以并行化。
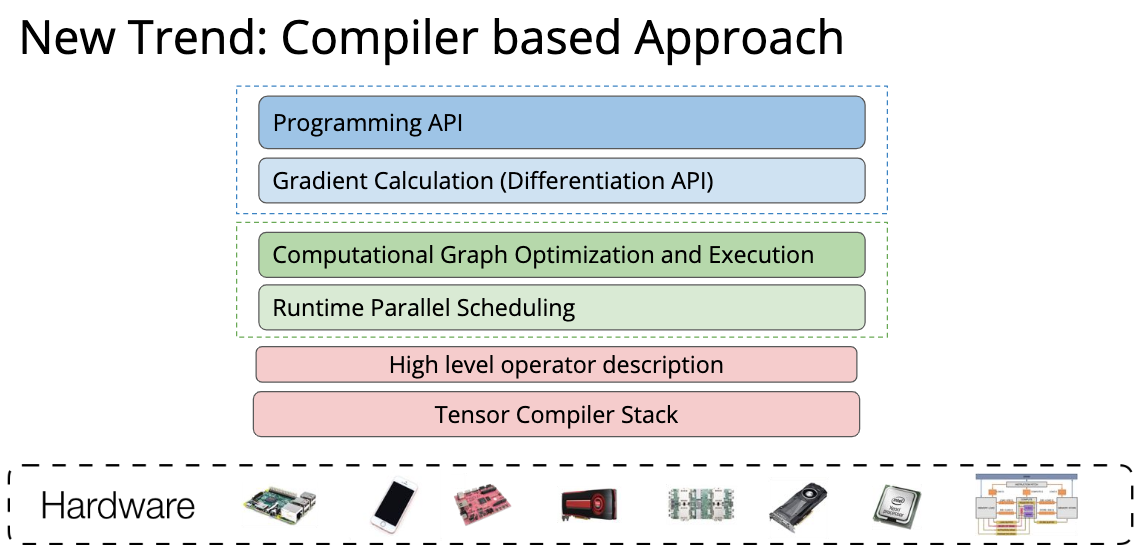
然后简单介绍一下最底层的情况,我们训练完了 model,要部署到不同的设备上。想必大家也都听过各种各样的厂商搞出过各种各样的部署方法,为了产生更好的模型性能:
TVM 就是为了解决这样的问题而诞生的,只要我们都搞成中间代码,全栈自动编译优化,这样 model 就可以非常简单的部署到不同的设备上了:
这门课将在接下来详细介绍 Deep Learning System 的三个部分。
Lecture 4: Backpropagation and Automatic Differentiation
第四节课讲的是 Deep Learning 中的求导方式——Auto-Diff. 首先我们要了解现代计算机实现求导通常有哪些方式。 第一种叫做 Symbolic Differentiation,如图所示:
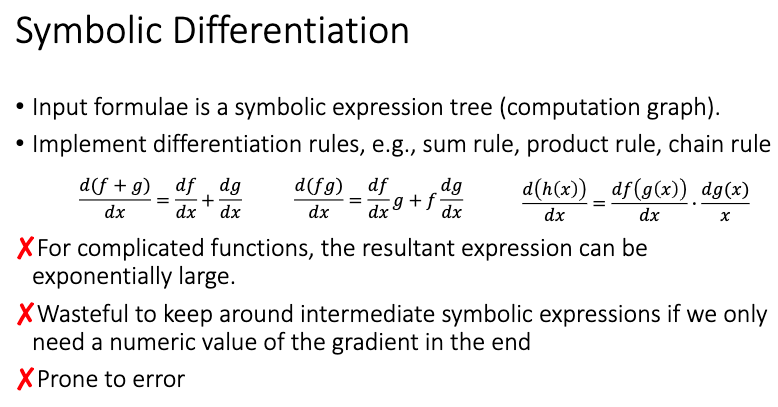
通过程序来维护整个求导的式子,然后把变量带入就得到最终的导数。这种做法的缺点在于表达式是一个很难维护的东西,最后要维护的东西就会越来越多。正常 Deep Learning 框架显然不应该选择这种求导方式... 第二种叫做 Numerical Differentiation,这种求导形式非常简单,看起来很适合计算机:
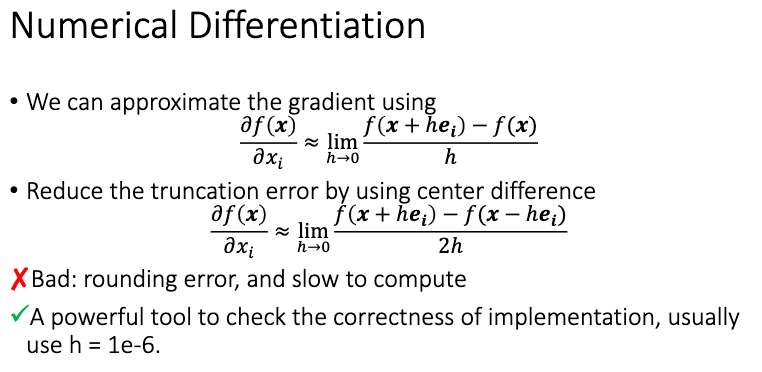
但是有个很关键的问题是,这种求导方法要进行两次正向传播,跑起来很慢,而且误差会比较大。但是因为其实现方式的简单,所以这是一个非常好的 grad check 工具。Ng 在 DL 专项里面也是用这种方式去进行 grad check 的。 第三种叫做 Backpropagation,现代 Deep Learning 的核心:
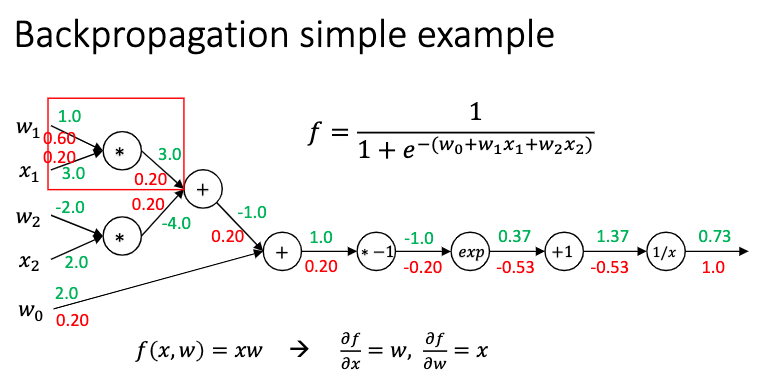
虽然这种做法很适合计算机,效率也不错。但有一个关键的问题,我们在做正向传播的时候要记录中间结果,这样才能在后面进行反向传播,内存耗费很大。而且难以形成计算图,无法进行通用的并行化。 这时候就需要掏出第四种方法,叫做 Automatic Differentiation:
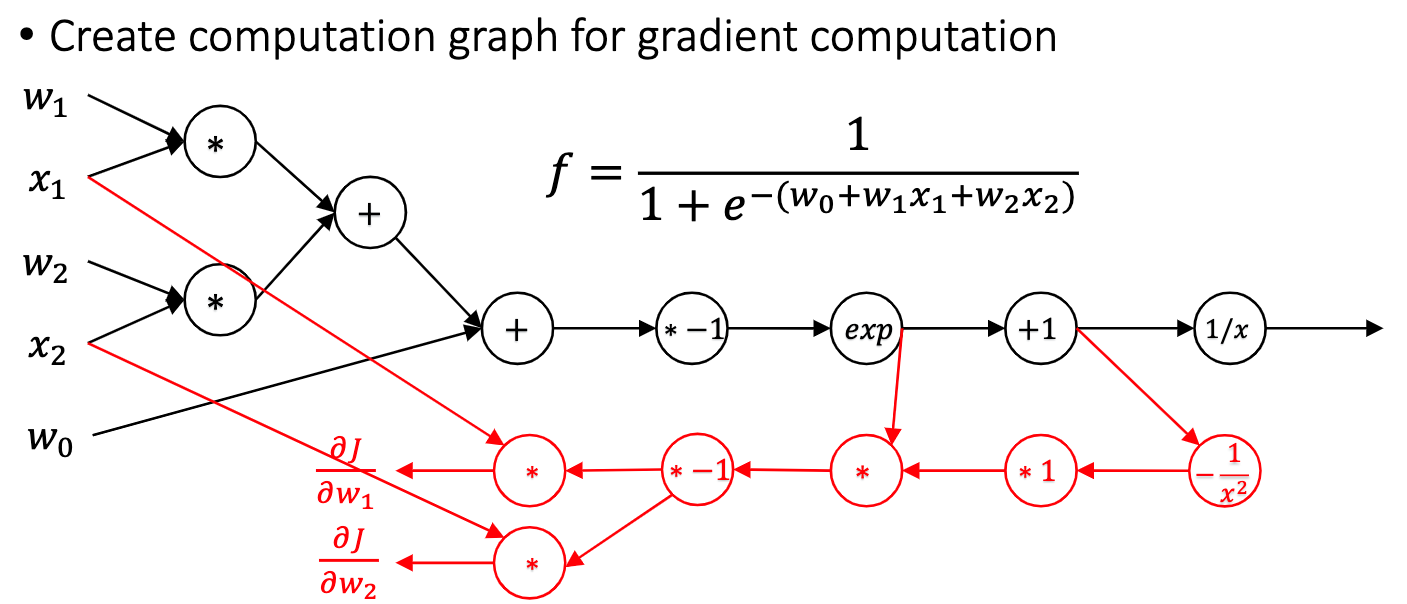
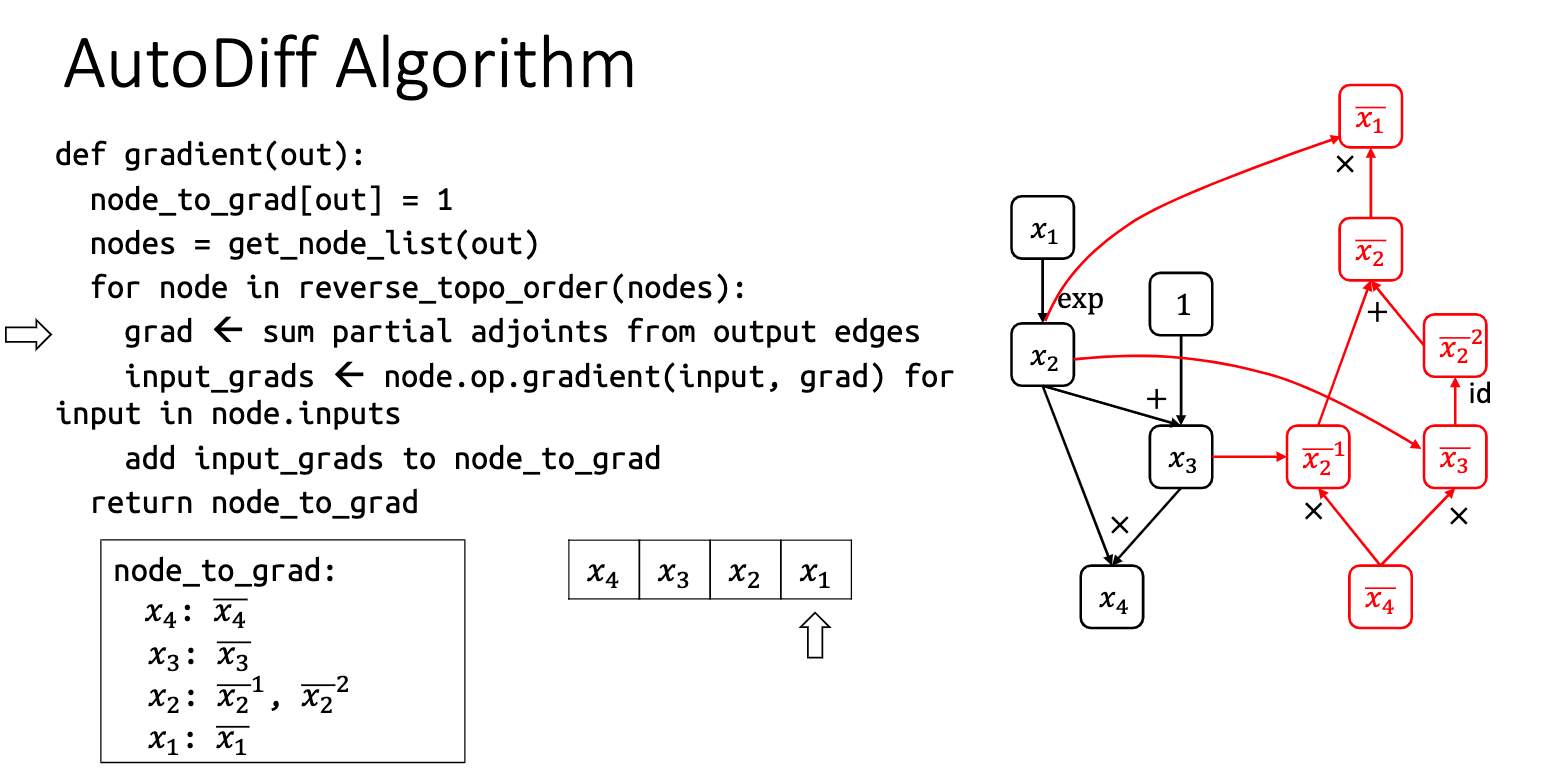
其实思路非常简单,看伪代码就看的出来。这种方法就是通过反拓扑序去生成一个反向的计算图,因为是计算图所以不用保存任何中间变量;也因为是计算图,所以可以进行通用的并行化与代码优化,两全其美! 接下来就是 Auto-diff 的具体实现,也就是 assignment 1。这次作业的难度不是太大,前面就是一些算子的简单实现,后面有两段重要的代码:
1 | for node in topo_order: |
这段是前向传播的部分,记录每个节点计算出来的结果。前向传播需要正向拓扑序。
1 | for node in reverse_topo_order: |
这段是反向形成 Auto-diff 计算图的过程,跟伪代码很像。进一步解释一下:按照反拓扑序来遍历节点,计算到这个节点就代表着所有相关的梯度都计算完了。现在需要把相关的梯度都加起来,然后加起来的梯度作为这个节点向后面传播的梯度。整个过程很容易理解。
Lecture 5: GPU Programming
这一讲涉及到的部分比较底层,虽然浙大本科的硬件三连质量非常高,但是对于 GPU 架构接触还是非常少的,又没有视频,只能尽力看一看了... 首先讲的是 CPU 的架构,很容易理解,CPU 跟内存有关的操作都很慢,所以才有各种指令预测、cache 优化算法之类的折磨着一代有一代的计算机学子:
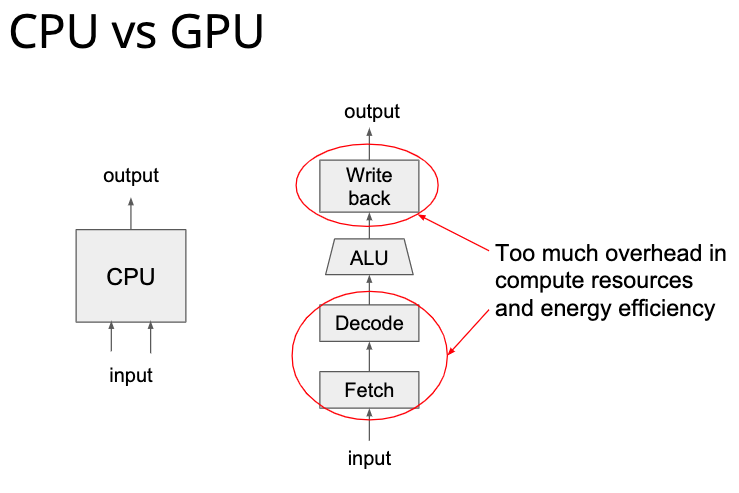
而 GPU 则是给 CPU 加了一大堆计算资源,比普通的指令向量化更加强劲:
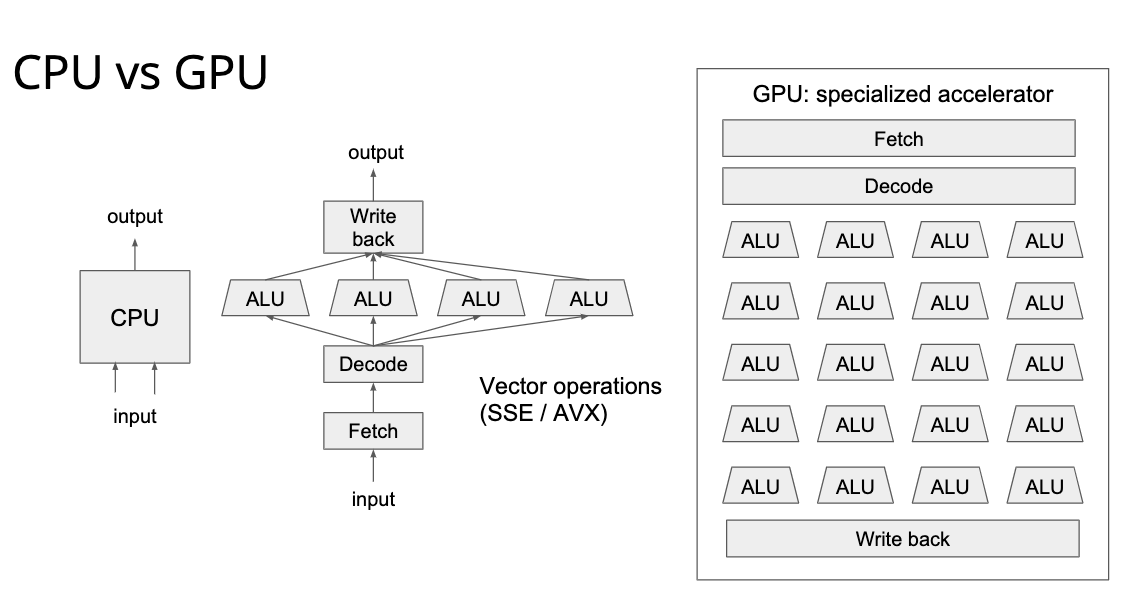
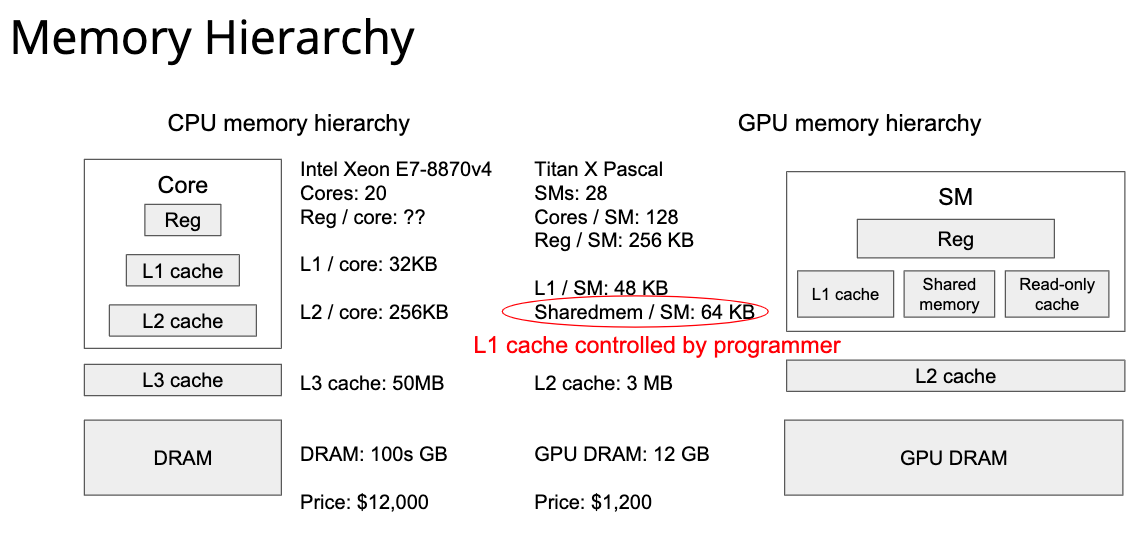
从这个图可以看出来,GPU 的寄存器数量非常大,所以他可以开很多线程去并行计算,但是从这个图也可以看出来,GPU 的 cache 小的可怜,所以 GPU 适用于那种轻内存读写、重计算的任务,也就是大量的并行计算任务。
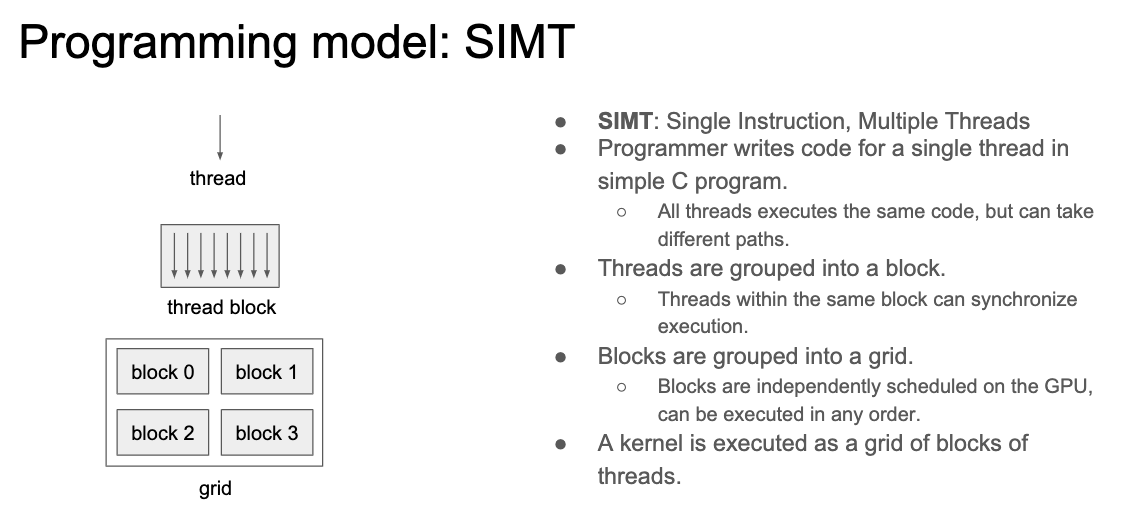
然后讲了 CUDA Programming Model,因为我完全不懂 CUDA 编程,所以后面的东西都是我瞎理解的,不一定对。 这个叫做 SIMT 的 Model 就是把几个 thread group 成一个 block,再把几个 block group 成一个 grid,block 可以以任何顺序在 GPU 上面调度。
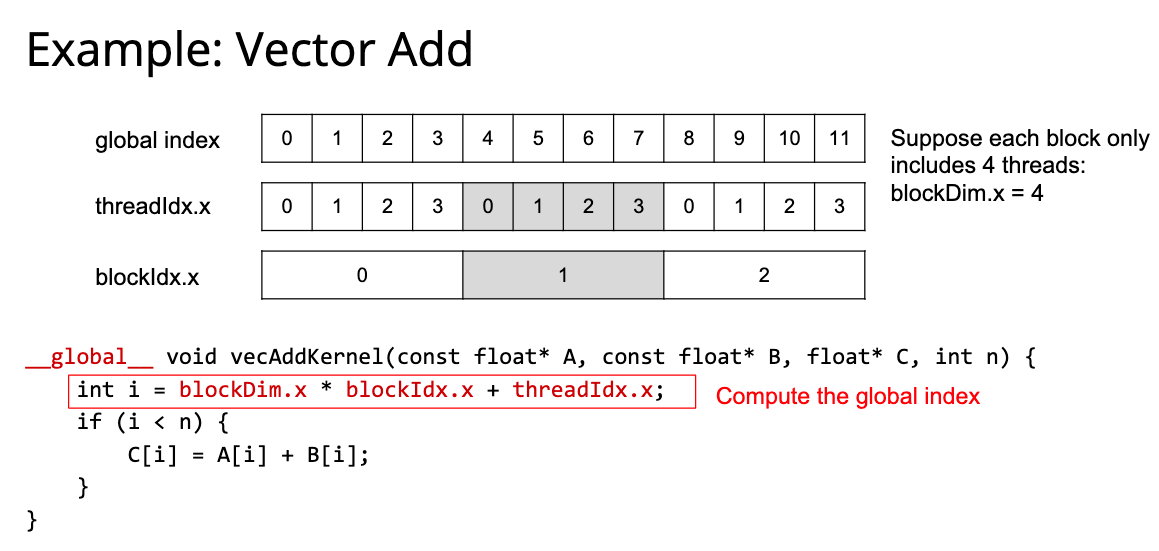
然后是个最简单的 cuda 程序——vector add。过程非常简单,跟操作系统里面查页表差不多,这里通过 block 下标和 thread 下标可以得到向量加法的下标,然后每个线程都执行一样的代码就可以了。
后面讲了一个窗口 sum 的例子,因为他图画的不太好,所以有点难以理解,我尽力理解了一下:
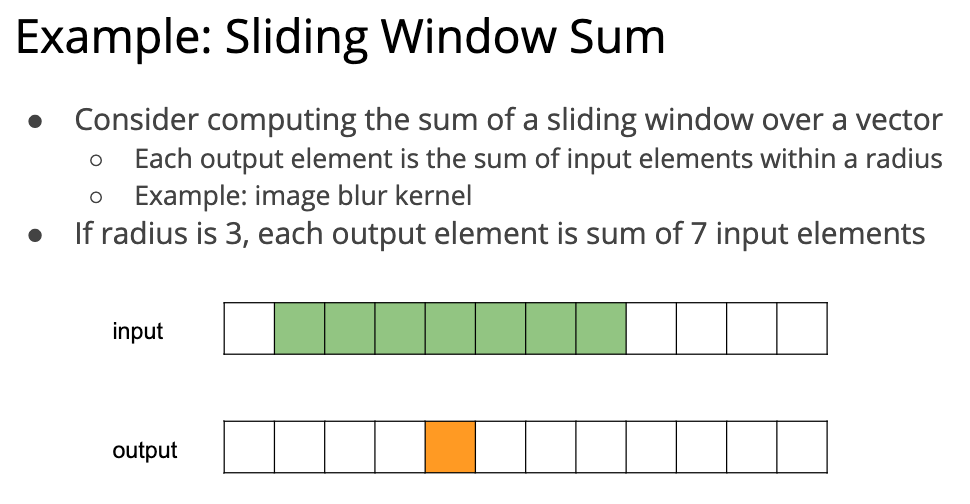
最简单的实现方式是这样的:
1 |
|
为什么说他图画的不太好,因为他的图跟代码的下标其实是对应不上的。B[0] 的结果应该是从 A[0] 到 A[6] 的和才对,这样下标就和代码完全对应上了。 这个实现非常简单,所以有很大的优化空间。其中最脑残的地方就是每个线程都读了 7 次 A,这样对 GPU 这种小 cache 来说是非常残忍的。
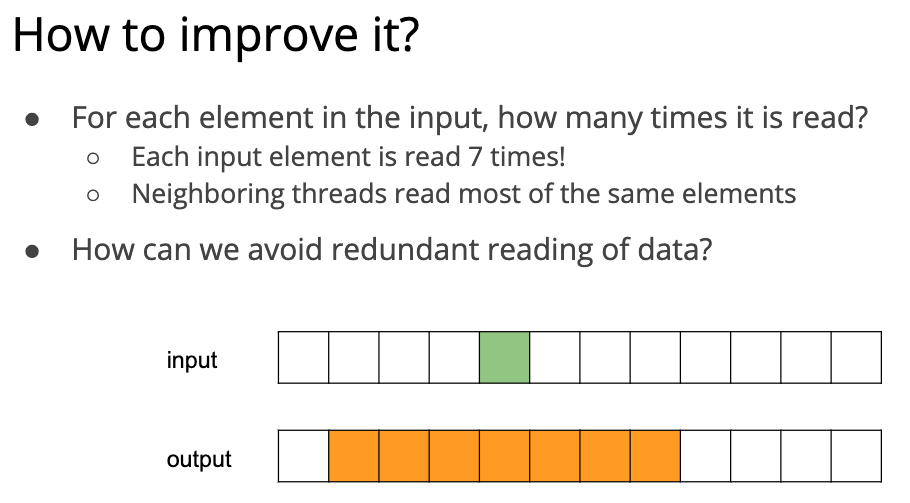
所以一个非常简单的优化就是从一个线程读 7 次 A,变成一个 block (假设有四个线程) 读 9 次 A。
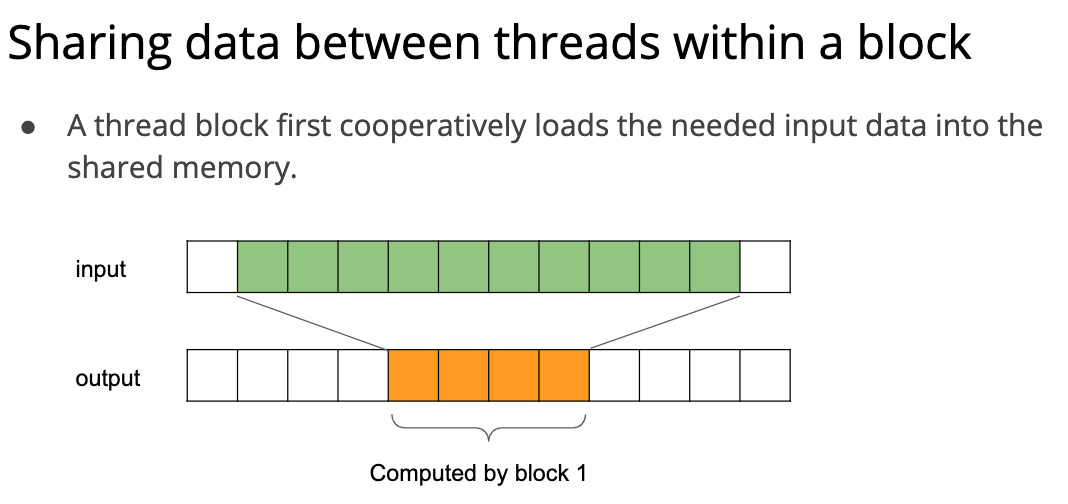
那么下面的实现就很好理解了:
1 | __global__ void windowSumKernel(const float* A, float* B, int n) { |
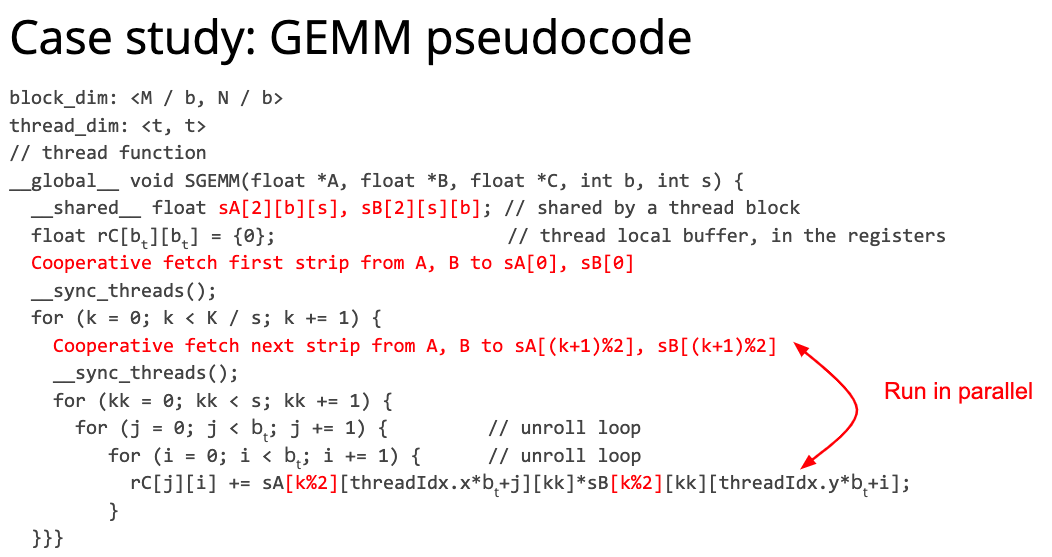
其中比较奥妙的地方是 if (threadIdx.x < RADIUS) 这个语法块,其实也不难理解,就是把两边的 RADIUS 部分充满。最后是一个简单的矩阵乘法程序:
Lecture 6: Optimize for Hardware Backends
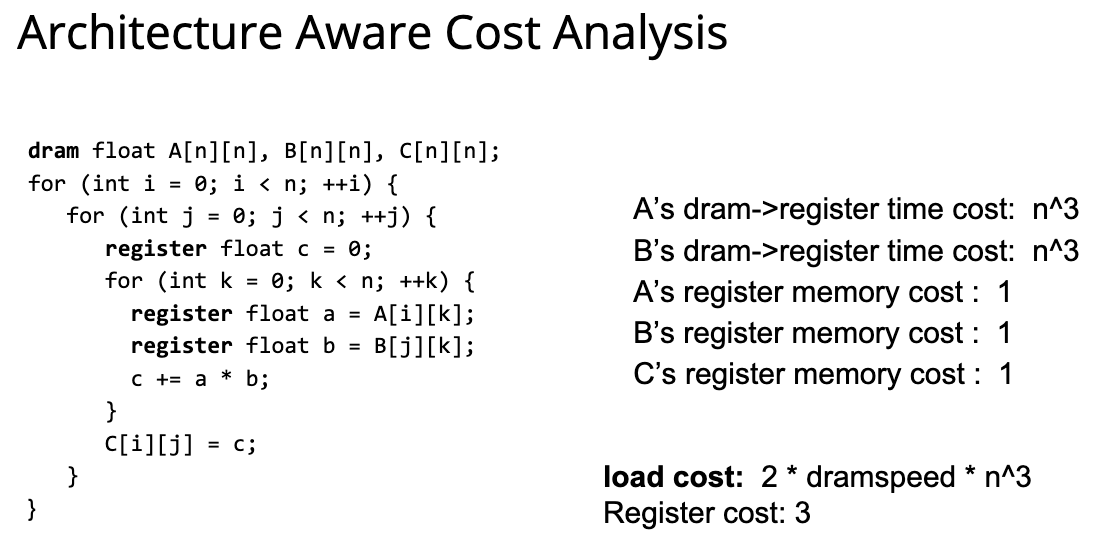
这一讲处于计算图和硬件之间。 首先讲了一些体系结构的基本知识,比如多级 cache 之类的,然后讲了矩阵乘法的 cache 优化,非常基础。 最简单的矩阵乘法如下图所示:
像上面这样直接做矩阵乘法,其实对 cache 的利用率并不高,更好的方式是把矩阵分成很多个小块:
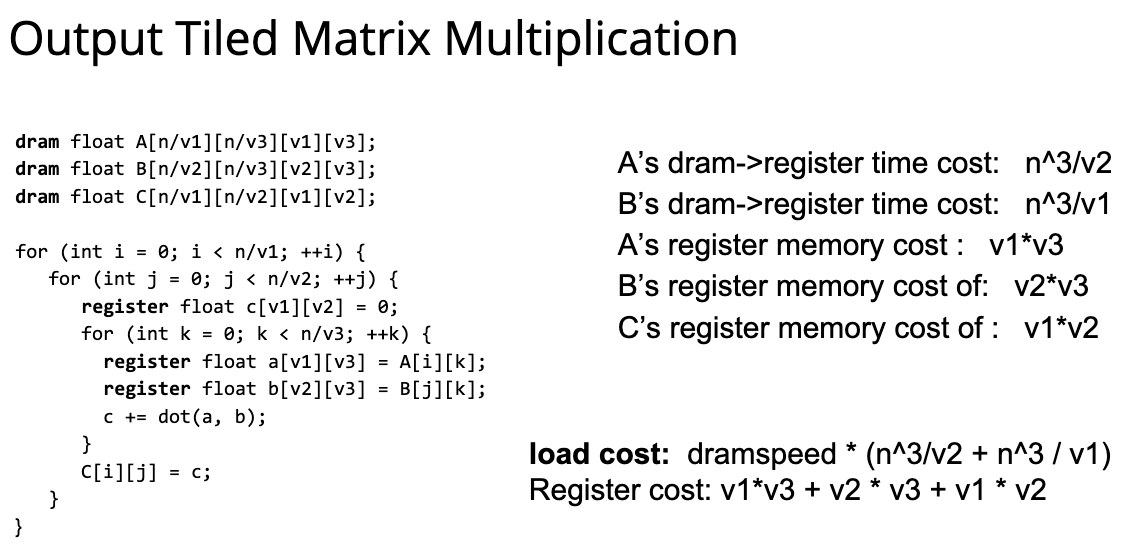
分块的方法可以缩小从下级 cache 到寄存器的 cost,有人想那我直接把 v1、v2 高的大一点,这样不就可以优化更多了吗? 但是通常来说,寄存器非常小,很难存下一整列或者一整行,所幸 CPU 的 cache 通常比较大,也许可以存下:
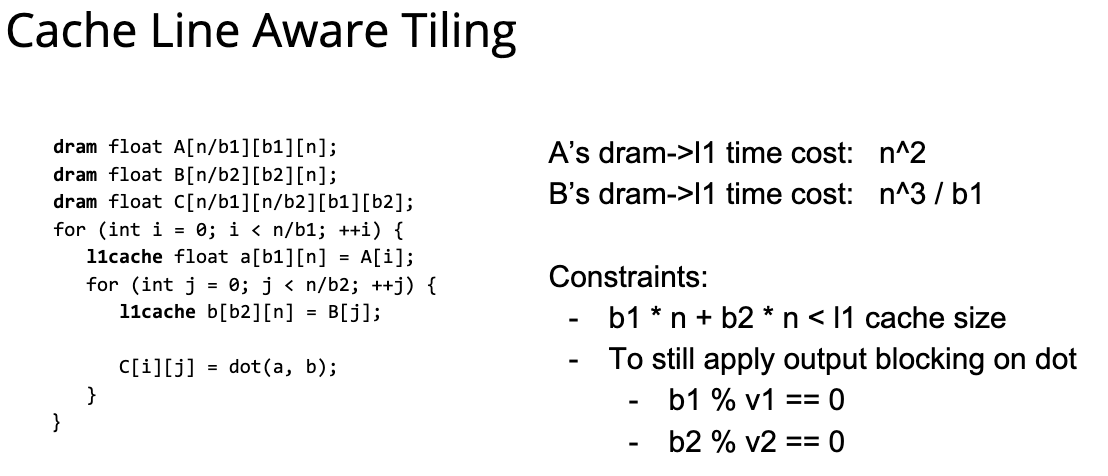
把对寄存器的优化和 L1 cache 的优化相结合,就得到了下面这种比较复杂的优化方式:
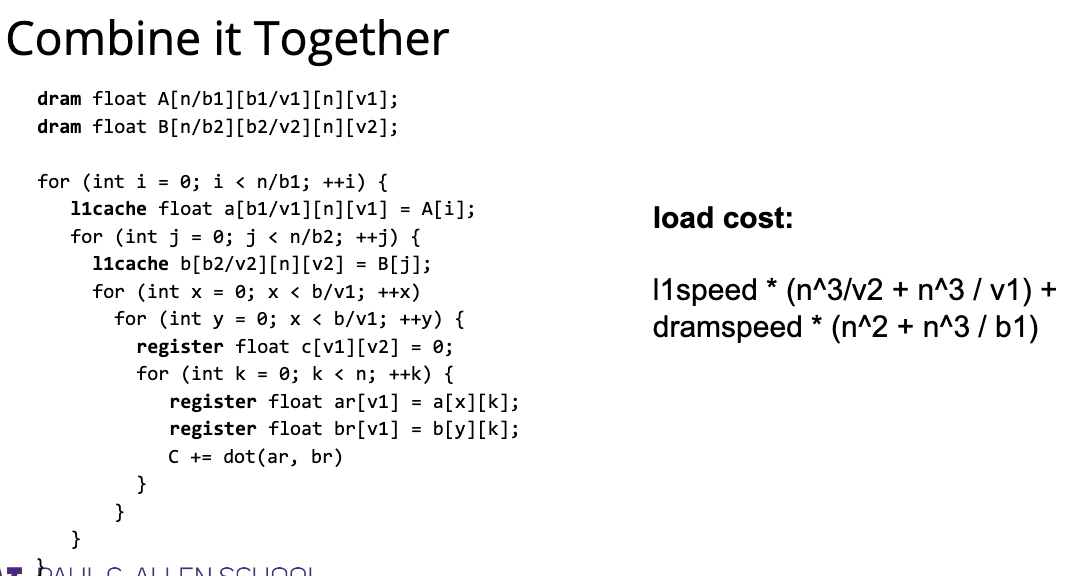
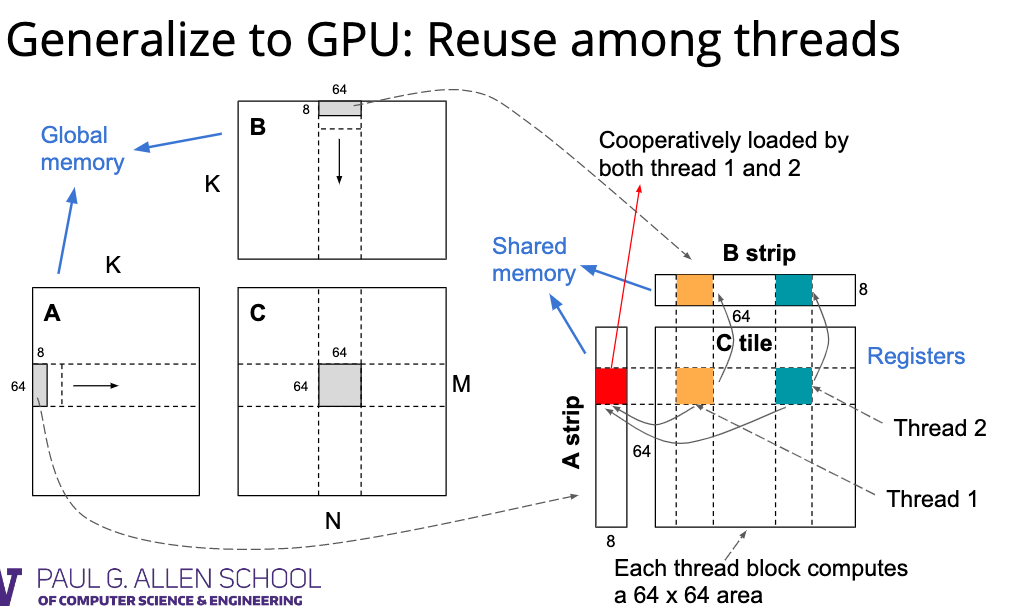
对于 CPU 来说,代码优化可能集中于 Reuse memory 上面,而 GPU 的优化则是集中于 Reuse among threads 上。(这段其实不太懂,我理解就是跟前一讲的那个 window sum 一样,优化复用不同线程的内存)
对于计算图的代码优化,其实套路千变万化:
为了解决这样的优化问题,我们就需要本门课的核心内容——TVM 了!